Գրիչները կարելի է բաժանել մի քանի տեսակների, այդ թվում՝ էլեկտրական և օդաճնշական:Այսպիսով, ո՞րն է տարբերությունը էլեկտրական բռնակների և օդաճնշական բռնակների միջև:
1: Ի՞նչ է արդյունաբերական բռնիչը:
Արդյունաբերական բռնիչները հայտնի են նաև որպես մեխանիկական բռնիչ մեխանիզմներ:Ռոբոտի բռնիչի մեխանիզմը նախագծված է ըստ իրական աշխատանքի պահանջների և ունի տարբեր ձևեր։
Մեխանիկական բռնիչները սովորաբար երկու մատով բռնիչներ են, որոնք բնութագրվում են շարժման, բռնելու և մեխանիզմի հատկություններով:Հաջորդը, եկեք խոսենք մի քանի կարևոր ասպեկտների մասին:Մեկը օդաճնշական ծայրերի սեղմման մեխանիզմն է, որը բնութագրվում է գործողության շատ արագ արագությամբ, հեղուկությունը գալիս է հիդրավլիկ համակարգից, համեմատաբար փոքր ճնշման կորստով և հարմար է միջքաղաքային հսկողության համար:Երկրորդը ներծծող ծայրի սեղմման մեխանիզմն է, որն օգտագործում է ներծծող բաժակի ներծծող ուժը՝ առարկան տեղափոխելու համար:Այն հիմնականում հարմար է արտաքին տեսքի հարաբերակցության և հաստության չափավոր աճ ունեցող օբյեկտների համար, ինչպիսիք են ապակին, պարզապես թուղթը և այլն: Մեկը հիդրավլիկ ծայրային սեղմիչ մեխանիզմ է, որը սեղմում է առարկաները հիդրավլիկ սեղմման և զսպանակի արձակման միջոցով:Սակայն, ի վերջո, արդյունաբերական ռոբոտների ճանկերը կարող են օգնել մեզ ավելի լավ կատարել մեր աշխատանքը:
2. Տարբերությունը էլեկտրական բռնիչի և օդաճնշական բռնիչի միջև
Համեմատ օդաճնշական բռնիչներով, արդյունաբերական ավտոմատացման ոլորտում էլեկտրական բռնիչներ կիրառելը ունի հետևյալ բնութագրերը.
1), էլեկտրական շարժիչի տեսակն ունի ինքնափակման մեխանիզմ, որը կարող է կանխել աշխատանքային մասի սարքավորումների վնասումը հոսանքի խափանումից:Համեմատ օդաճնշական բռնիչներով, այն ավելի անվտանգ է.
2), էլեկտրական բռնիչն ունի ծրագրավորվող կառավարման գործառույթ՝ հասնելու բազմակետ դիրքավորման:Օդաճնշական բռնիչներն ունեն ընդամենը երկու կանգառ, մինչդեռ էլեկտրական բռնիչները կարող են ունենալ ավելի քան 256 կանգառ:Էլեկտրական մատի արագացումը և դանդաղումը կարելի է վերահսկել՝ նվազագույնի հասցնելու ազդեցությունը աշխատանքային մասի վրա:
3), էլեկտրական բռնիչը ճկուն բռնիչ է, որը կարող է հասնել ճշգրիտ ուժի վերահսկման, մինչդեռ օդաճնշական բռնիչը տատանվող գործընթաց է:Սկզբունքորեն կա տատանում, որը դժվար է վերացնել։Էլեկտրական բռնիչի սեղմիչ ուժը կարող է կարգավորվել փակ հանգույցի ուժի վերահսկման համար:Կռվան ուժի ճշգրտությունը կարող է հասնել 0,01 Ն, իսկ չափման ճշգրտությունը կարող է հասնել 0,005 մմ:Օդաճնշական բռնակների ուժն ու արագությունը հիմնականում անվերահսկելի են, ուստի դրանք չեն կարող օգտագործվել բարձր ճկունությամբ նուրբ աշխատանքի համար:
4), էլեկտրական բռնիչի ծավալը շատ ավելի փոքր է, քան օդաճնշական բռնիչը:Այն նաև շատ հարմար է տեղադրել։Պահպանումը պարզ է.
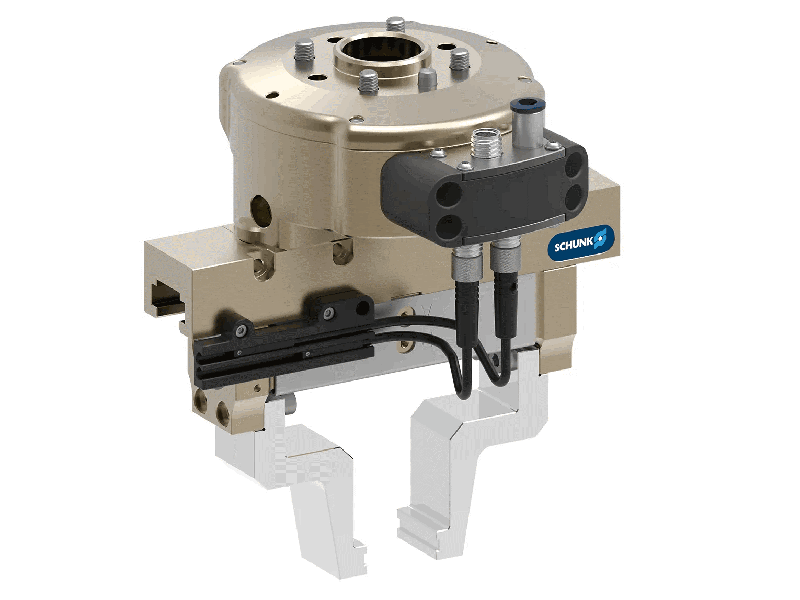
օդաճնշական բռնիչ
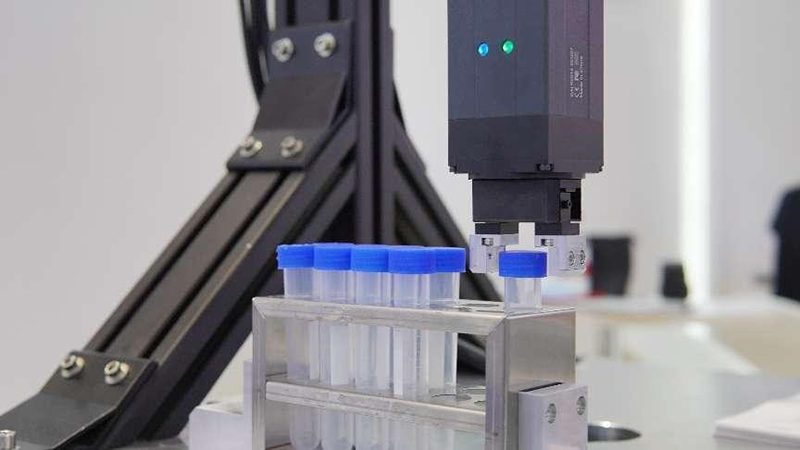 Էլեկտրական բռնիչ
Էլեկտրական բռնիչ
3. Էլեկտրական բռնիչի առավելությունները
1. Վերահսկեք ծնոտների դիրքը
Ծնոտների դիրքը կարելի է որոշել կոդավորված շարժիչի և համապատասխան կառավարման սխեմայի միջոցով:Ի տարբերություն ավանդական ծնոտների, սովորաբար անհրաժեշտ է պահել ամբողջ հարվածը:Էլեկտրական բռնիչներ օգտագործելիս օգտագործեք միայն անհրաժեշտ բացվածքը մասի մոտ, այնուհետև նվազագույնի հասցրեք ճանապարհորդությունը:Մասի անջատիչները հեշտացնում են մասերի չափսերի ավելի լայն շրջանակի ընտրությունը՝ չվնասելով արտադրական ցիկլի ժամանակները:
2. Վերահսկել բռնելով և արագությամբ
Քանի որ շարժիչի հոսանքն ուղիղ համեմատական է կիրառվող ոլորող մոմենտին, հնարավոր է վերահսկել կիրառվող բռնման ուժը:Նույնը վերաբերում է փակման արագությանը:Օրինակ, սա կարող է օգնել փխրուն մասերի հետ:
Հրապարակման ժամանակը՝ Dec-19-2022