
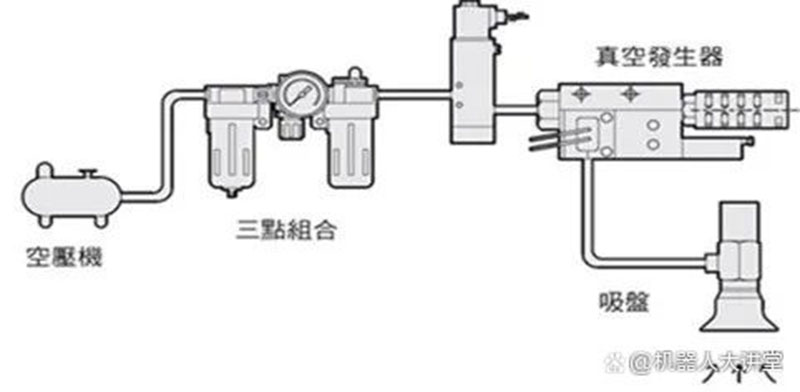
Ֆունկցիոնալ կառուցվածքի տեսանկյունից վակուումային գեներատորի կատարումը հիմնականում էլեկտրամագնիսական հսկիչ փական է, որը վերահսկում է վակուումային գեներատորը բացասական ճնշման առաջացումը և կանգառը իրականացնելու համար, որպեսզի հասնի աշխատանքային մասի ներգրավման և ազատման գործառույթին:
Արդյունքում, համակարգը հիմնականում ներառում է հետևյալ բաղադրիչները. 1. Սեղմված օդի աղբյուր;2. Զտիչ;3. Անջատիչ էլեկտրամագնիսական փական;4. Վակուումային մղիչ;5. Վերջնական ներծծման բաժակ, օդային բարձիկ և այլն (Տիպիկ կառուցվածքը ներկայացված է ստորև նկարում):
Բացի այդ, արդյունաբերական ավտոմատացման պահանջների համաձայն, վակուումային կլանման գործընթացի մոնիտորինգը իրականացնելու համար, որոշ արտադրողներ, ընդհանուր առմամբ, վերջին տարիներին համակարգին ավելացնում են օդաճնշական կառավարման բաղադրիչներ, ինչպիսիք են հոսքաչափերը, ճնշման հայտնաբերման անջատիչները և հարևանության անջատիչները:
Այնուամենայնիվ, քանի որ բաղադրիչների մեծ մասը փոփոխվում է ինտեգրատորի կողմից՝ ըստ հաճախորդի կարիքների և տեղում աշխատանքային պայմանների, ամբողջ համակարգի բարդությունը հաճախ բարձր է:
Միևնույն ժամանակ, բաղադրիչների մի քանի արտադրողները տանում են տեղում տեղադրման և գործարկման բարդ աշխատանքների, և նրանցից ոմանք ունեն էներգիայի բարձր սպառում և 100% կախվածություն գազի աղբյուրներից:Մասնակի ինտեգրումը կարող է անհնարին լինել
Խուսափեք աղմուկի աղտոտումից, ինչը նշանակում է անընդունելի խնդիրներ բարձր ճշգրտության և բարձր մաքուր միջավայրերի համար, ինչպիսիք են լիթիումային մարտկոցները և կիսահաղորդիչները:
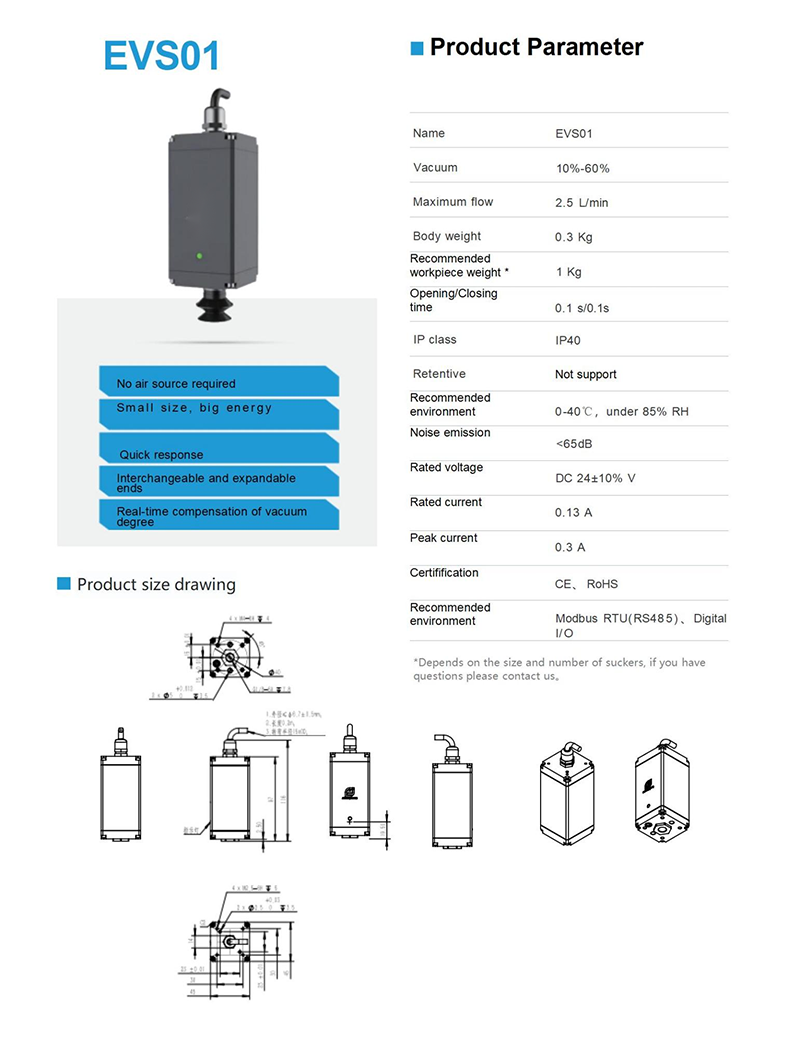
Ընդհանուր առմամբ, EVS-ը նոր սերնդի էլեկտրական ինտելեկտուալ վակուումային ակտուատոր է, որը չի պահանջում սեղմված օդի լրացուցիչ աղբյուր, որն, անկասկած, գրավիչ է:
Օդային խնայող համակարգի ամենամեծ առավելությունը տեղադրման հեշտությունն է:Որովհետև դա, անկասկած, կարող է նվազեցնել բազմաթիվ օժանդակ բաղադրիչներ, ներառյալ օդային կոմպրեսորները, օդի պահեստավորման տանկերը, օդի մաքրման սարքավորումները և ելքային խողովակները և այլն, ինչը հաճախորդների համար ավելի հեշտ և հարմար և պարզ է դարձնում էլեկտրագծերի օգտագործումը:
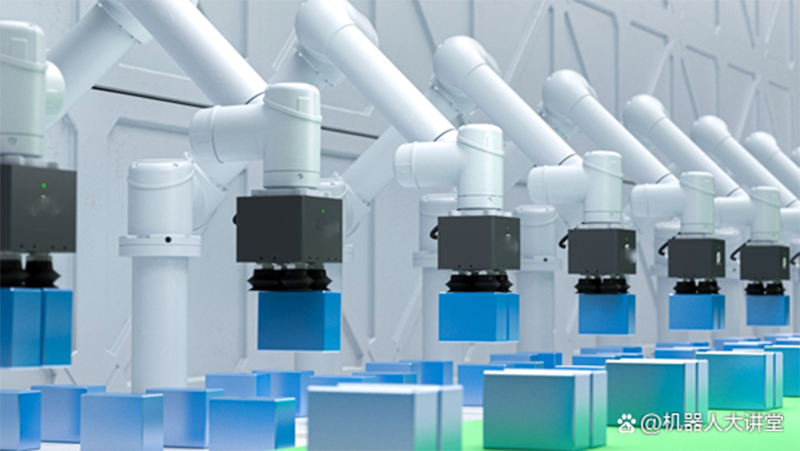
Հաղորդվում է, որ ներկայումս շատ տեսարաններ, այդ թվում՝ շարժական ռոբոտների հարթակներ, 3C էլեկտրոնային հավաքում, լիթիումի մարտկոցների արտադրություն, կիսահաղորդչային արտադրություն, էքսպրես լոգիստիկա և այլն, ունեն համեմատաբար կոմպակտ տարածության դասավորություն:
EVS08 ներծծող քառակուսի մարտկոց
Լրացուցիչ մանրամասներ և առավելություններ
Ռոբոտի դասախոսությունների սրահում իմացան, որ այս ապրանքը, որը շատ փոքր տեսք ունի և կշռում է ընդամենը 2,5 կգ, կարող է հասնել 10 կգ բարձր մակարդակի։24 Վ ցածր լարման դիզայնի շնորհիվ էներգիայի սպառումը կազմում է ավանդական օդաճնշական համակարգի 20%-ը, և վերջում կլանման ուժը կարող է սահմանվել և կարգավորվել, իսկ կլանման ուժը կարող է հասնել 102-510Ն:
Կառուցվածքային դիզայնի առումով EVS-ն ընդունում է ավելի կոմպակտ և թեթև կառուցվածքային դիզայն, որը EVS-ն դարձնում է 30%-ով փոքր, քան ավանդական աերոդինամիկան նույն բեռի համար:
Միևնույն ժամանակ, այն կարող է ուղղակիորեն միացված լինել ռոբոտային թևի վերջում գտնվող միակցիչին, ինչը նվազեցնում է ավելորդ օժանդակ բաղադրիչները, դարձնում այն ավելի ճկուն, կարող է արագ տեղակայվել և հեշտությամբ կլանել բազմաթիվ մեծ առարկաներ, հատկապես հարմար կուտակում, բեռնաթափում և տեսարանի այլ գործողություններ:
Օգտագործման հարմարավետությունը բարելավելու համար էլեկտրական վակուումային մղիչն ունի նաև ինտեգրված ինտերֆեյս, որը կարող է օգտագործվել վերահսկելու և վերահսկելու օբյեկտների կլանման ողջ գործընթացը:
Հաղորդվում է, որ սա հաճախորդների հարմարության համար է՝ հրահանգների միջոցով վերահսկելու վակուումային մղիչի վակուումային աստիճանը, ինչպես նաև միանալ IO հղման միջոցով՝ կլանման գործընթացի մոնիտորինգի և կանխատեսելի պահպանման համար:Կարգավիճակի մոնիտորինգը կնվազեցնի սխալներն ու խափանումները և կապահովի համակարգի հասանելիությունը:
Այս հիման վրա EVS-ի առավելություններն ու բնութագրերը արտացոլված են նաև հետևյալ կետերում.
1. Կոմպակտ կառուցվածք և թեթև քաշ. EVS-ը 30%-ով փոքր է ավանդական օդաճնշական չափից, երբ կլանում է բեռը նույն քաշը:Այն կարող է միացվել մեխանիկական թևի վերջում գտնվող միակցիչի հետ, որպեսզի հասկանա բեռի կլանումը, հատկապես հարմար է կուտակման, բեռնաթափման և տեսարանի այլ գործողությունների համար.
2. Տերմինալի առատ կոնֆիգուրացիա. Տարբեր տեսակի ներծծող գավաթներ, անվտանգության բարձիկներ և այլ բաղադրիչներ կարող են կազմաձևվել տարբեր առարկաների, այդ թվում՝ քառակուսի, գնդաձև և հատուկ ձևի բաղադրամասերի բռնելու համար։
3. Կրկնակի ալիքները կարող են կառավարվել ինքնուրույն. հեշտությամբ կառավարել վակուումային մղիչի ձախ և աջ կողմերը, իսկ երկու կողմերը միմյանցից անկախ են՝ հետագայում բարելավելով արտադրական գծի աշխատանքային արդյունավետությունը:Այն իրականացնում է միաժամանակ ներծծումը և տեղադրումը, ինչը մեծապես հեշտացնում է առարկաների մշակումն ու տեսակավորումը՝ խնայելով տարածություն և ժամանակ.
4. Կարգավորելի ներծծում. վակուումի աստիճանը կարող է ճշգրտվել ըստ ծծվող արտադրանքի բնութագրերի, և իրական ժամանակում վակուումի փոխհատուցումը կարող է իրականացվել.
5. Կարգավիճակի հետադարձ կապ. Այն ունի վակուումային հետադարձ կապի սենսոր, որը կարող է իրական ժամանակում հայտնաբերել օբյեկտների կլանման կարգավիճակը և ապահովել հետադարձ կապ և ահազանգ;
6. Էլեկտրաէներգիայի անջատման պաշտպանություն. սնուցումից հետո այն կարող է իրականացնել կլանման անջատման ինքնափականացում՝ պաշտպանելու ներծծված օբյեկտները;
7. Ուժեղ հարմարվողականություն. աջակցություն 24V I/O և MODBUS RTU (RS485) կապի արձանագրություն;
8. Հեշտ է տեղադրվում և կարգաբերվում. կապի արձանագրությունը պարզ է և ընթեռնելի, ինչը մեծապես նվազեցնում է վրիպազերծման դժվարությունը:Բացի այդ, հյուրընկալող համակարգչի կարգաբերման ծրագիրը կարող է կցվել որպես նվեր, որը կարող է կարգավորվել և խմբագրվել՝ օֆլայն ռեժիմում ֆունկցիայի պարամետրերը սահմանելու համար:
Եզրակացություն և ապագա
Ավտոմատացման և հետախուզության տենդենցի ներքո էլեկտրական վակուումային ակտուատորներն ավելի ու ավելի են դառնում առանցքային բաղադրիչ՝ ապահովելու ռոբոտների և ավտոմատացման համակարգերի բնականոն աշխատանքը՝ դարձնելով էլեկտրական շարժիչ համակարգերի օգտագործումը ավելի հարմար և հեշտ օգտագործման համար, և կարող են հանդիպել ավելի բազմազան սցենարների, ինչպիսիք են. շարժական կոմպոզիտային ռոբոտներ..
Ինտեգրված ինտերֆեյսը և հարուստ տերմինալի կազմաձևումը և այլ օպտիմիզացումները կարող են հետագայում բարելավել ռոբոտի հիմնական բաղադրիչների հուսալիությունը, նվազեցնել արտադրության դադարեցումները և վերջնական օգտագործողների համար հեռավոր տեղակայման խնդիրները, ինչպես նաև նվազեցնել պահպանման և վաճառքից հետո ծախսերը:
Հրապարակման ժամանակը՝ Ապրիլ-19-2023