Ներկայումս շուկայում գործող շարժիչների մեծ մասն ունի երկու տեսակի ուժի կառավարման մեթոդներ.
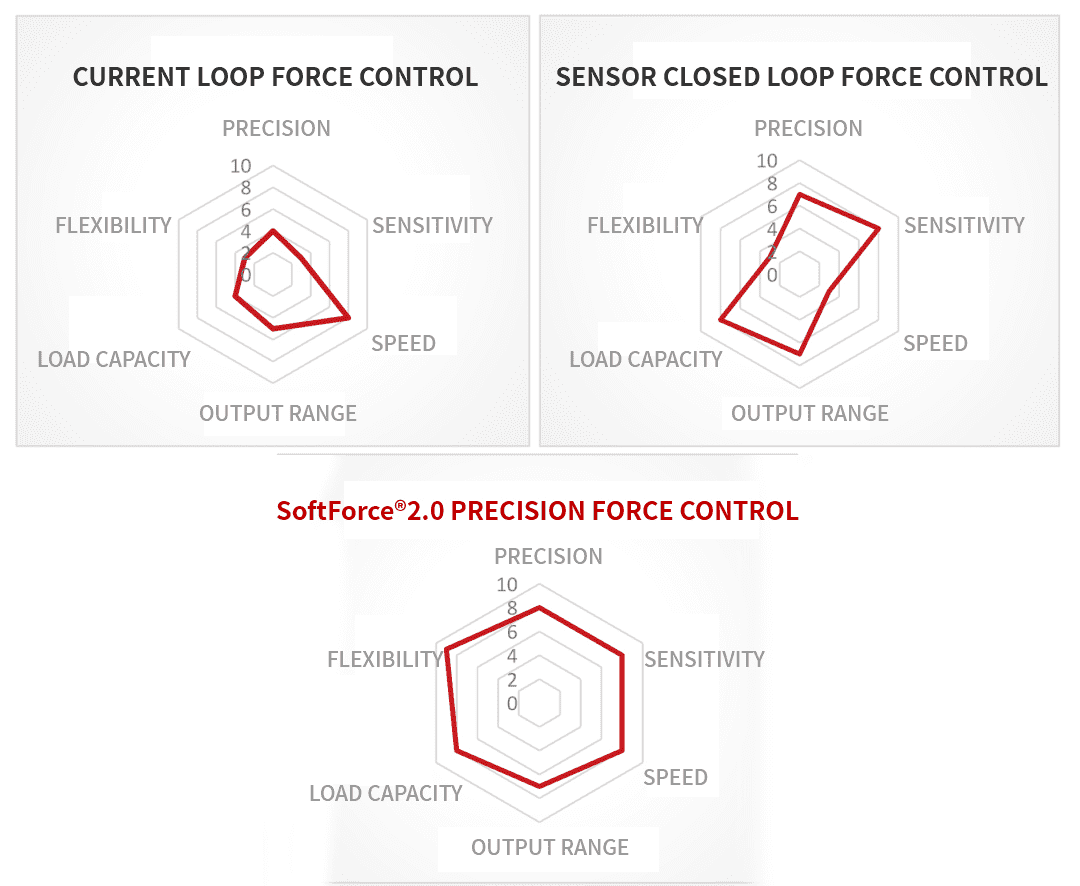
1. Ընթացիկ հանգույցի ուժի վերահսկում
Համեմատաբար հեշտ կիրառելի ուժի վերահսկման սովորական մեթոդ, որն իրականացնում է ուժի կառավարում` կարգավորելով շարժիչի ներքին հոսանքը:Առավելությունն այն է, որ այն ավելի քիչ դժվար է իրականացնել, և այն կարող է հասնել ուժի վերահսկման 5%-15% ճշգրտության սահմաններում;Թերությունն այն է, որ շարժման արագությունը դանդաղ է, այն չի կարող շրջվել, և այն չի կարող բավարարել որոշ սցենարների կարիքները, որոնք ունեն ավելի բարձր ճշգրտության պահանջներ:Օգտագործման ժամանակաշրջանից հետո մեխանիկական մաշվածությունը կբերի սխալների և ավելի կնվազեցնի ճշգրտությունը:
Նման ակտուատորները սովորաբար չունեն սենսորներ, և նույնիսկ եթե կան սենսորներ, դրանք օգտագործվում են միայն որպես ուժի «ցուցադրումներ» և չեն մասնակցում հսկողությանը:Օրինակ, մամուլում սենսոր ավելացնելով, սենսորը կարդում է ուժի չափը և ցույց է տալիս արժեքը հաշվիչի միջոցով, որն օգտագործվում է ուժի չափի ձեռքով կարգավորելու համար, բայց նման կարգավորումը, ընդհանուր առմամբ, կապ չունի: ուժի ճշգրտությամբ։

Սխեմատիկ դիագրամ, որը կապված չէ գրաֆիկայի և տեքստի հետ
2. Սենսորային փակ օղակի ուժի կառավարում
Ուժի վերահսկման մեկ այլ մեթոդ է սովորական ուժի ցուցիչի և սովորական փակ օղակի կառավարման ալգորիթմ ավելացնելը:Առավելությունն այն է, որ ճշգրտությունը բարելավված է, բայց թերությունն այն է, որ արագությունը դեռ դանդաղ է:Այս կերպ ուժի կառավարման ճշգրտությունը կարող է 5%-ից հասցնել 1%-ի։Եթե չկա ճիշտ ալգորիթմի մշակում, կամ սենսորային արագությունը բավականաչափ արագ չէ, այն հակված է «գերանցման»:
Ուժի վերահսկվող ակտուատոր
Անխուսափելի «գերանցումը».
Սենսորի փակ օղակի ուժի վերահսկման մեթոդը դժվար է հաղթահարել ազդեցության ուժը:Ամենաուղղակի դրսևորումն այն է, որ «գերանցում» շատ հեշտ է առաջանալ, երբ գործ ունենք բարձր տեմպերով տեսարանների հետ։
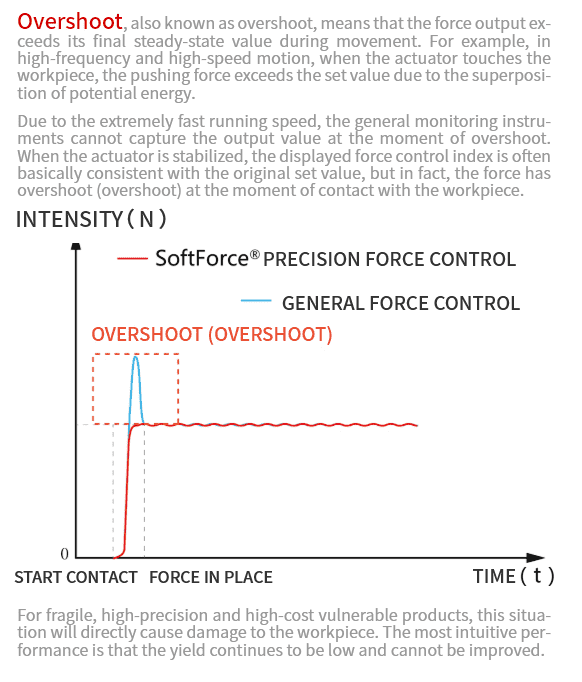
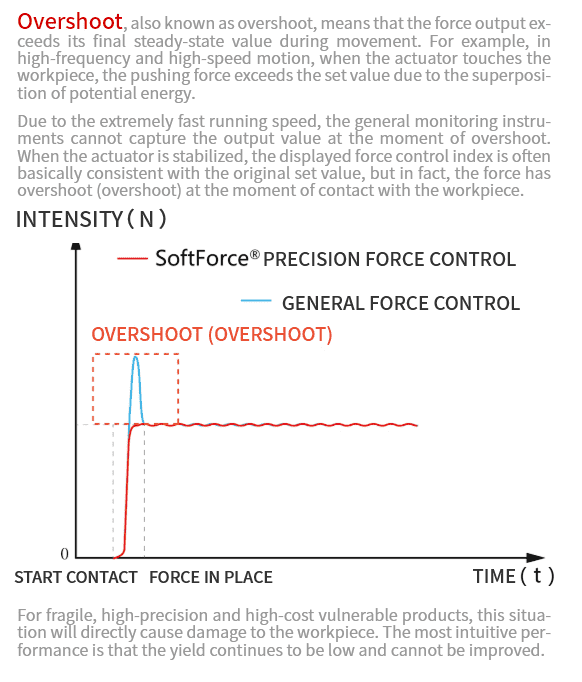
օրինակ
Ընդհանրապես, բարձր արագության և մեծ ելքի դեպքում, այն պահը, երբ գործարկիչը շփվում է աշխատանքային մասի հետ, հաճախ առանձնահատուկ մեծ է:Օրինակ, եթե մղիչի ուժը սահմանված է 10 Ն, ապա հեշտ է հասնել 11Ն և 12Ն, երբ այն դիպչում է աշխատանքային մասին, այնուհետև այն հետ կանչվում է 10N՝ կառավարման ալգորիթմի միջոցով:Նման խնդիրներ հաճախ առաջանում են, երբ շուկայում ավելացվում են ուժային սենսորներ և, այսպես կոչված, ուժային կառավարվող շարժիչներ:
Սա այն խնդիրն է, որ արձագանքման արագությունը բավականաչափ արագ չէ:Բարձր արագությունը և ճշգրիտ և կայուն արդյունքն ինքնին զույգ հակասություններ են:Եթե կա գերազանցում (գերանցում), ապա տեղում ճշգրիտ ուժն անիմաստ է:
Հատկապես ճնշման հավաքման, փխրուն և թանկարժեք մասերի ճշգրիտ սարքավորումների գործընթացում գերակատարումը սովորաբար չի թույլատրվում:
Ամբողջ ուժի կառավարում, բարձր հաճախականություն և բարձր արագություն առանց գերազանցման:
Ինչպե՞ս է դա անում TA-ն:
Բարձր ճշգրտության կիրառման սցենարների համար ընդունված է «փափուկ վայրէջքի» մեթոդը՝ հաշվի առնելու բարձր արագության և բարձր ճշգրտության պահանջները, այսինքն՝ սեգմենտային ուժի կառավարումը:Շարժիչը արագորեն մոտենում է աշխատանքային մասին դիրքի շարժման ռեժիմով, արագ անցնում է ուժի կառավարման ռեժիմին այն դիրքում, որտեղ այն պատրաստվում է շփվել աշխատանքային մասի հետ, և աստիճանաբար մեծացնում է ելքը մինչև այն հասնի նախադրված արժեքին:Դիրքի ռեժիմ + ուժի կառավարման ռեժիմ + ուժի կայունացման ժամանակ, օգտագործված ընդհանուր ժամանակը շարժիչի մեկ կատարման արդյունավետությունն է:
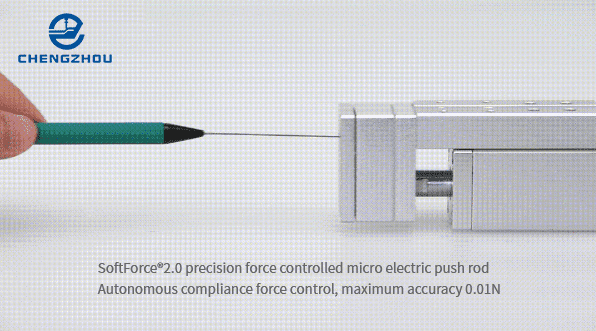
Բարձր արագության ուժի սենսորի և մոդելի վրա հիմնված կանխատեսող կառավարման ալգորիթմի հետ միասին՝ SoftForce®2.0 ճշգրիտ ուժով կառավարվող մղիչը կարող է ավտոմատ կերպով նույնականացնել մղիչի դիրքը և կոնտակտային վիճակը աշխատանքային մասի հետ, այնպես որ գործարկիչը որպես ավտոմատացման ավարտ: սարքավորում, ունի նույն գործառույթը, ինչ մարդու ձեռքը:շոշափելի ընկալում, վերահսկում և կատարման հետախուզություն:
Նույն հեռավորության վրա «SoftForce ®2.0 Precision Force Control»-ի փափուկ վայրէջքի արագության միջակայքը մեծանում է, հանդուրժողականությունն ավելի մեծ է, և այն կարող է հասնել նույնիսկ ամբողջական ուժի վերահսկման, որն ուղղակիորեն բարելավում է արտադրության ցիկլը և զգալիորեն նվազեցնում փորձարկման և ծախսերը: սխալի ստուգում.
▋ Մշակման բարձր հաճախականություն՝ ավելի լավ կատարողականության հասնելու համար
Շուկայում սովորաբար օգտագործվող «վեց առանցք ուժի սենսոր + ռոբոտ» ուժի կառավարման սխեմայի հաշվարկման ցիկլը 5-10 միլիվայրկյան է, այսինքն՝ մշակման հաճախականությունը 100-200 Հց է։SoftForce®2.0 ճշգրիտ ուժով կառավարվող շարժիչների մշակման հաճախականությունը կարող է հասնել 4000 Հց (այսինքն՝ 0,25 միլիվայրկյան), իսկ բարձր հաճախականությամբ սերիայի մոդելները կարող են հասնել 8000 Հց, ինչը 4-8 անգամ գերազանցում է ընդհանուր ռոբոտի ուժով կառավարվող շարժիչների մշակման հաճախականությունը:
▋Ակտիվ համապատասխան ուժի հսկողություն, որը կարող է հետևել արտաքին ուժի փոփոխությանը
Արդյունավետ արձագանքման արագությունը և ուժի ակնթարթային արձագանքը հնարավորություն են տալիս մղիչին ակնթարթորեն արձագանքել արտաքին ուժերին և հասնել համապատասխան ուժի ակտիվ վերահսկման:Նույնիսկ եթե շահագործման ընթացքում արտաքին ուժեր են բախվում, այն կարելի է ժամանակին կարգավորել՝ գործընթացը դարձնելով ավելի ճշգրիտ:Աշխատանքային մասերի ավելի լավ պաշտպանություն:
Բարձր հաճախականություն և բարձր արագություն՝ առանց գերազանցման
Նույնիսկ բարձր հաճախականության և արագընթաց շարժման դեպքում այն դեռ պահպանում է ելքի բարձր ճշգրտությունը և միևնույն ժամանակ ապահովում է «փափուկ վայրէջք» և «ոչ գերազանցում», շփվում է մասերի մակերեսի հետ բարձր արագությամբ, փոքր ուժով և կատարում ճկուն: մասերի հավաքում և տեղադրում և այլն, որպեսզի խուսափեն նուրբ և փխրուն մասերին վնասելուց:Բաղադրիչներ.
SoftForce®2.0 Ճշգրիտ ուժի վերահսկում
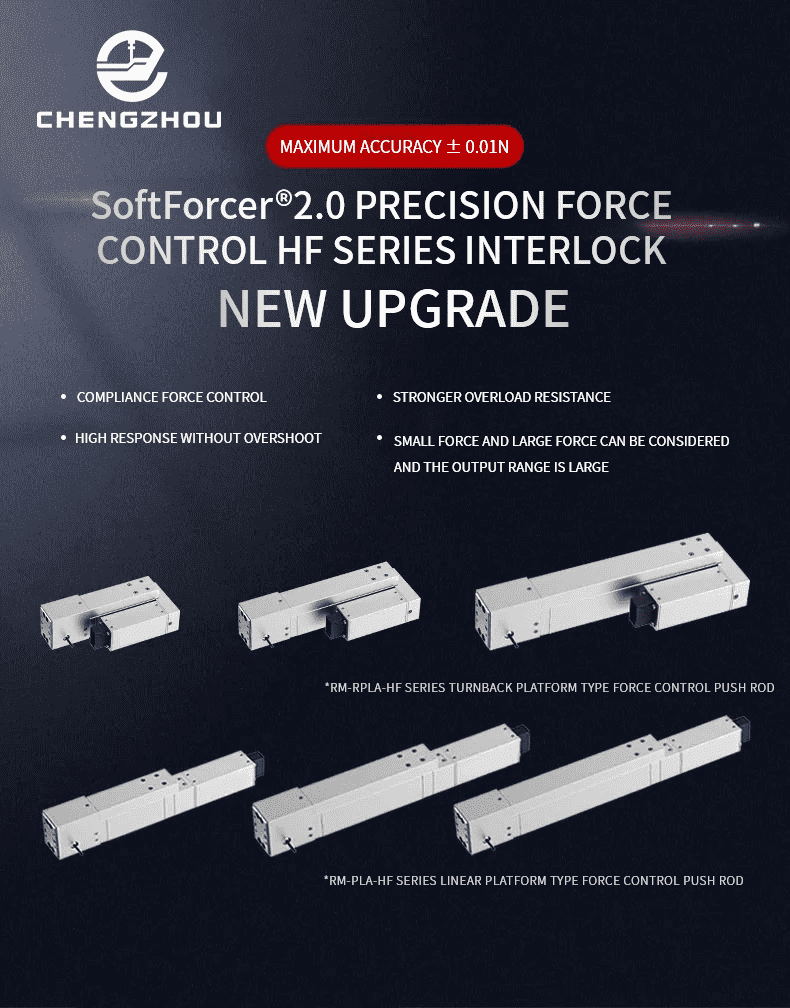
HF շարքի նոր թարմացում
▋ Ավելի ուժեղ հակածանրաբեռնվածություն
Հիմնվելով տեղում գործընթացի խորը ընկալման և բազմակի կրկնությունների վրա՝ Չենգժոուի նոր արդիականացված SoftForce®2.0 ճշգրիտ ուժի կառավարման HF սերիան այս տարվա փետրվարին ունի ինտեգրված սենսորային դիզայն, և դրա հակածանրաբեռնվածությունը մի քանի անգամ ավելի բարձր է, քան նախկինում։ անցյալը՝ ավելի բարձր ամրությամբ և օգտագործման հեշտությամբ:Հաղթահարեք ավելի բարդ պայմաններին.
▋Կարող է հաշվի առնել և՛ փոքր ուժը, և՛ մեծ ելքը
Հագեցած SoftForce®2.0 բարձր ճշգրտության ուժի կառավարման համակարգով, ճշգրիտ ուժով կառավարվող սահող սեղանը և մեծ հարվածով և մեծ բեռով հրման ձողը կարող է առաջացնել փոքր և ճշգրիտ ուժ բարձր բեռի տակ, ինչպես նաև կարող է հաշվի առնել ուժը միաժամանակ: ժամանակը, իսկ ելքային տիրույթն ավելի լայն է:Ավելի մեծ, այսինքն՝ ավելի լայն ուժի դինամիկ տիրույթ*:
* Ուժի դինամիկ միջակայք. առավելագույն և նվազագույն ուժի հարաբերակցությունը, որը կարելի է ելքային:
Ճշգրիտ ուժի կառավարումը կարող է օգտագործվել միայն մեկ առանցքի վրա
SoftForce®2.0 ճշգրիտ ուժով կառավարվող մղիչները կարող են ոչ միայն օգտագործվել մեկ առանցքում, այլև ավելի շատ հնարավորություններ են տալիս բազմաառանցքային հավաքման լուծումների համար:Օրինակ, Chengzhou Technology-ի կողմից գործարկված վերջին «RM Chengzhou 2D Synchronous Precision Force Control Platform Control System»-ը կազմված է երկու «Chengzhou» ճշգրիտ ուժով կառավարվող էլեկտրական շարժիչներից, որոնք կարող են փոխարինել «վեց առանցք սենսոր + ռոբոտ» կառավարման սխեմայի ուժը: օգտագործվում է բջջային հեռախոսների ներքին շրջանակի ճշգրիտ հղկման և մաքրման համար և այլն:
Chengzhou 2D համաժամանակյա ճշգրիտ ուժի կառավարման պլատֆորմի կառավարման համակարգ
(Հագեցած է SoftForce®2.0 բարձր ճշգրտության ուժի կառավարման համակարգով)
Բարդ և հեշտ օգտագործման մասնագիտական ծառայություններ
Կառավարման առաջադեմ ալգորիթմը և վրիպազերծման պարզ գործընթացը հաճախորդներին տալիս են հարմարավետ օգտատերերի փորձ:Նույնիսկ ցածր մակարդակ ունեցող օպերատորը կարող է սկսել 5 րոպեում, իսկապես «միացնել և խաղալ»:
Միևնույն ժամանակ, Chengzhou Technology-ի պրոֆեսիոնալ և ուժեղ հետվաճառքի տեխնիկական սպասարկման թիմը կարող է հաճախորդներին տրամադրել ժամանակին, համապարփակ և անհանգստացնող տեխնիկական աջակցություն առաջին անգամ՝ լինի դա տեխնիկական կասկածներ, ուսուցում, անսարքությունների վերացում կամ սպասարկում:
Chengzhou Technology-ն միշտ բավական համարձակ է եղել՝ ընդլայնելու իր սահմանները:Իր ամուր և նորարարական տեխնիկական ուժով այն շարունակաբար թողարկել է ավելի խելացի, ավելի ճշգրիտ և ավելի համատեղելի բարձրորակ շարժիչ արտադրանք՝ կիսահաղորդիչների փաթեթավորման և փորձարկման, 3C ավտոմատացման, ճշգրիտ արտադրության, խելացի բժշկական և այլ ոլորտների համար:հիմնական բաղադրիչները, ինչպիսիք են շարժման ճշգրիտ կառավարման համակարգերը և շարժման սարքերը:
Հրապարակման ժամանակը` մայիս-31-2022